In questa lezione ci occupiamo di sistemi determinati, indeterminati e impossibili, ovvero mostriamo come capire se un sistema lineare (o sistema di equazioni di primo grado) è determinato, indeterminato o impossibile. Tratteremo per semplicità il solo caso di sistemi di due equazioni in due incognite.
Gli aggettivi “determinati, indeterminati e impossibili” per i sistemi hanno praticamente lo stesso significato che avevamo visto a suo tempo per le equazioni di primo grado. Così, se un sistema lineare è determinato, questo ammetterà un’unica soluzione (nel caso dei sistemi “due per due”, una coppia di valori). Invece, se un sistema è indeterminato, questo ammetterà infinite soluzioni. Infine, un sistema impossibile non ammetterà alcuna soluzione.
Ora, nel caso dei sistemi di due equazioni in due incognite possiamo impostare i nostri ragionamenti ricorrendo a delle rette. In particolare, dato che un’equazione di primo grado rappresenta una retta, in un sistema lineare di due equazioni in due incognite ci ritroviamo con le equazioni di due rette. Di conseguenza, mostreremo che se un sistema è determinato (o possibile, o compatibile) le due rette hanno un punto di intersezione. Se invece il sistema è indeterminato, le due rette hanno infiniti punti di intersezione. Infine, se il sistema è impossibile, le due rette non hanno alcun punto di intersezione (e quindi, sono parallele non coincidenti).
Fatte le dovute premesse, vediamo subito le definizioni di sistemi determinati, indeterminati ed impossibili, introducendo le relative condizioni. Via! 🙂
Sistemi determinati indeterminati ed impossibili: rette ed equazioni di primo grado
Consideriamo la seguente equazione di primo grado in forma normale:
ax+b=0
L’espressione al primo membro rappresenta una retta, in particolare la retta di equazione:
y=ax+b
Ora, l’equazione {ax+b=0} richiede che la retta si intersechi con l’asse delle {x}. In altre parole, tale equazione equivale al sistema:
\begin{cases}y=ax+b \\ \\ y=0 \end{cases}da cui effettivamente applicando il metodo di sostituzione otteniamo l’equazione {ax+b=0}.
Nota. Ricordiamo che l’asse delle {x} è rappresentato dall’equazione {y=0}, poiché effettivamente in un riferimento cartesiano l’asse delle {x} è l’insieme di tutti i punti aventi coordinata {y} uguale a zero. Stiamo attenti a non confonderci, pensando erroneamente che l’asse {x} sia rappresentato dall’equazione {x=0}. Quest’ultima è invece l’equazione che rappresenta l’asse {y}.
Ora, l’uguaglianza:
y=ax+b
rappresenta un’equazione di primo grado in due incognite, ove è esplicitata l’incognita {y}. Così, dato un sistema lineare in forma normale di due equazioni in due incognite:
\begin{cases}a_1x+b_1y=k_1 \\ \\ a_2x+b_2y=k_2 \end{cases}possiamo certamente riscrivere ciascuna equazione di primo grado esplicitando la {y}:
\begin{cases}y=\dfrac{ k_1-a_1x}{b_1}\\ \\ y=\dfrac{ k_2-a_2x}{b_2} \end{cases} \quad \Rightarrow \quad \begin{cases}y=-\dfrac{a_1}{b_1}x+\dfrac{k_1}{b_1} \\ \\ y=-\dfrac{a_2}{b_2}x+\dfrac{k_2}{b_2} \end{cases}Ora, osserviamo che i coefficienti delle {x} rappresentano i coefficienti angolari delle due rette. Così, la prima retta avrà coefficiente angolare:
m_1 = -\dfrac{a_1}{b_1}mentre la seconda retta avrà coefficiente angolare:
m_2 = -\dfrac{a_2}{b_2}Ora, abbiamo detto che il sistema di partenza può essere scritto nella forma:
\begin{cases}y=-\dfrac{a_1}{b_1}x+\dfrac{k_1}{b_1} \\ \\ y=-\dfrac{a_2}{b_2}x+\dfrac{k_2}{b_2} \end{cases} \qquad *)E’ chiaro che il sistema impone l’uguaglianza della quota {y} relativa alle due rette. In altre parole, risolvere il sistema equivale a ricercare l’eventuale punto di intersezione tra le due rette rappresentate dalle equazioni a sistema.
Ora, è intuitivo che affinché due rette si intersechino è necessario e sufficiente che queste abbiano coefficienti angolari differenti. Per cui, un sistema lineare di due equazioni in due incognite sarà determinato, o possibile, o compatibile se vale la condizione:
-\dfrac{a_1}{b_1} \neq -\dfrac{a_2}{b_2}ovvero se i coefficienti angolari delle rette rappresentate da ciascuna equazione a sistema sono diversi tra loro.
Osserviamo che la condizione può essere riformulata come:
\small -a_1 \neq -\dfrac{a_2}{b_2}\cdot b_1 \quad \Rightarrow \quad \boxed{\dfrac{a_1}{a_2} \neq \dfrac{b_1}{b_2}} \quad \textbf{sistema determinato}Un sistema lineare è determinato se i coefficienti delle incognite non sono tra loro proporzionali.
A questo punto è lecito chiedersi: cosa succede se i due coefficienti angolari sono invece uguali tra loro?
In questo caso abbiamo due possibilità. Osserviamo che nel sistema * le quantità {\dfrac{k_1}{b_1}} e {\dfrac{k_2}{b_2}} rappresentano le quote per {x=0} di ciascuna retta corrispondente alle equazioni a sistema. Ciascuna di tali quantità è anche detta termine noto, ed è indicata con {q} se si rappresenta l’equazione di una retta con la comune notazione:
y=mx+q
ove ricordiamo, {m} è il coefficiente angolare.
Ora, due rette sono parallele e prive di punti di intersezione se i rispettivi coefficienti angolari sono uguali e se i rispettivi termini noti {q} sono tra loro differenti. E, se le rette sono prive di punti di intersezione, il sistema dato dalle equazioni che rappresentano tali rette è impossibile, ovvero non ammette punti di intersezione. E per quanto detto tale circostanza si verifica se valgono le condizioni:
\small \underbrace{-\dfrac{a_1}{b_1}=-\dfrac{a_2}{b_2}}_{\text{coeff. angolari uguali}} \quad \wedge \quad \underbrace{\dfrac{k_1}{b_1} \neq \dfrac{k_2}{b_2}}_{\text{termini noti diversi}} \quad \textbf{sistema impossibile}In questa circostanza il sistema non ammette alcuna soluzione.
Nota: il simbolo “{\wedge}” si legge “e contemporaneamente”, e corrisponde all’operazione di congiunzione logica.
Osserviamo che lavorando su ciascuna condizione possiamo scrivere:
-a_1=-\dfrac{a_2}{b_2}\cdot b_1 \quad \Rightarrow \quad \dfrac{a_1}{a_2}=\dfrac{b_1}{b_2}e:
k_1 \neq \dfrac{k_2}{b_2}\cdot b_1 \quad \Rightarrow \quad \dfrac{k_1}{k_2} \neq\dfrac{b_1}{b_2}Così affinché il sistema sia impossibile dovranno valere in modo del tutto equivalente le condizioni:
\dfrac{a_1}{a_2}=\boxed{\dfrac{b_1}{b_2}}\quad \wedge \quad \dfrac{k_1}{k_2} \neq\boxed{\dfrac{b_1}{b_2}}e infine, osservando che in entrambe le relazioni compare lo stesso rapporto {\dfrac{b_1}{b_2}}, possiamo ridurci alla condizione compatta:
\small \boxed{\dfrac{a_1}{a_2} = \dfrac{b_1}{b_2} \neq \dfrac{k_1}{k_2}} \quad \textbf{sistema impossibile}Un sistema lineare è impossibile se i coefficienti delle incognite sono proporzionali tra loro e allo stesso tempo i termini noti non sono proporzionali ai coefficienti delle incognite.
Torniamo ora a ragionare sulle rette, considerando il caso rimanente.
Se, oltre ai coefficienti angolari, sono uguali tra loro anche i termini noti, allora per ogni punto {x} ciascuna retta avrà la stessa quota {y}. Di conseguenza, se sono uguali sia i coefficienti angolari, sia i termini noti le rette saranno coincidenti e il sistema si dirà indeterminato:
\small \underbrace{-\dfrac{a_1}{b_1}=-\dfrac{a_2}{b_2}}_{\text{coeff. angolari uguali}} \quad \wedge \quad \underbrace{\dfrac{k_1}{b_1} = \dfrac{k_2}{b_2}}_{\text{termini noti uguali}} \quad \textbf{sistema indeterminato}In pratica abbiamo in questo caso infiniti punti di intersezione tra le due rette e quindi infinite soluzioni per il sistema lineare.
Procedendo in modo simile al caso precedente, possiamo riscrivere le precedenti condizioni in forma più compatta. In particolare con passaggi simili ai precedenti otteniamo la condizione:
\small \boxed{\dfrac{a_1}{a_2} = \dfrac{b_1}{b_2} =\dfrac{k_1}{k_2} }\quad \textbf{sistema indeterminato}Un sistema lineare è indeterminato se i termini noti e i coefficienti delle incognite sono tutti in proporzione tra loro.
Prima di proseguire con gli esempi, è il caso di fornire la seguente osservazione:
nel caso in cui i coefficienti angolari siano diversi tra loro non ha alcuna importanza il fatto che i termini noti siano uguali o diversi tra loro. Il sistema sarà comunque determinato. Infatti, le due rette si intersecheranno in entrambi i casi. Per tale motivo la condizione relativa ad un sistema determinato coinvolge unicamente i coefficienti delle incognite, trascurando i termini noti.
Esempi sui sistemi determinati, indeterminati ed impossibili
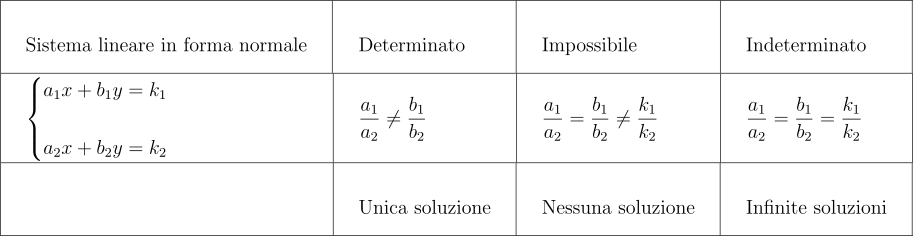
Vediamo come accorgerci a colpo d’occhio se un sistema è determinato, indeterminato o impossibile utilizzando le condizioni precedentemente ricavate. Anzitutto, conviene riassumere dette condizioni, nella loro forma compatta, nella seguente tabella.
Tabella riepilogativa delle condizioni relative ai sistemi lineari determinati, indeterminati ed impossibili
Esempio 1
Verificare se il seguente sistema è determinato, indeterminato o impossibile senza provare a risolverlo.
\begin{cases}x-y-10 = 0 \\ \\ y-17 = x \end{cases}Prima di tutto, attenzione. Dobbiamo riscrivere il sistema in forma normale. Soltanto in questo modo potremo individuare le quantità {a_1, \: b_1, \:a_2, \: b_2, \: k_1, \: k_2 } senza commettere errori.
In forma normale il sistema di partenza diviene:
\begin{cases}x-y=10\\ \\ x-y=-17 \end{cases}Ora il sistema è in forma normale con {a_1 = 1, \: b_1 = -1, \: a_2 = 1, \: b_2 = -1, \: k_1 = 10, \: k_2 = -17}.
Vediamo se il sistema è determinato. Testiamo la condizione relativa:
\dfrac{a_1}{a_2} \neq \dfrac{b_1}{b_2} \quad \Rightarrow \quad \dfrac{1}{1} \neq \dfrac{-1}{-1} \quad \Rightarrow \quad 1 \neq 1 \quad \textbf{falso}Dunque il sistema non è determinato. Ora resta da vedere se è impossibile oppure indeterminato. Calcoliamo il rapporto tra i termini noti:
\dfrac{k_1}{k_2}=\dfrac{10}{-17}=-\dfrac{10}{17} \neq \dfrac{a_1}{a_2}Poiché il rapporto tra i termini noti è diverso dai rapporti tra i coefficienti delle incognite (questi ultimi tra loro uguali), concludiamo che il sistema è impossibile.
Ciò del resto era già evidente una volta riscritto il sistema in forma normale. La quantità {x-y} non può infatti essere contemporaneamente uguale a {10} e a {-17}!
Esempio 2
Verificare se il seguente sistema è determinato, indeterminato o impossibile, senza provare a risolverlo.
\begin{cases}3x-6y=15 \\ \\ x-2y=5 \end{cases}Il sistema è già in forma normale. Vediamo se è determinato:
\dfrac{a_1}{a_2} \neq \dfrac{b_1}{b_2} \quad \Rightarrow \quad \dfrac{3}{1} \neq \dfrac{-6}{-2} \quad \textbf{falso}Dunque il sistema non è determinato. Resta da vedere se è indeterminato oppure impossibile. Come nell’esempio precedente, calcoliamo il rapporto tra i termini noti:
\dfrac{k_1}{k_2}=\dfrac{15}{5}=3 =\dfrac{a_1}{a_2}=\dfrac{b_1}{b_2}Poiché i coefficienti delle incognite e i termini noti sono tutti proporzionali tra loro (ovvero i corrispondenti rapporti sono tutti uguali tra loro), il sistema è indeterminato. Ciò significa che il sistema ammette infinite soluzioni.
Esempio 3
Il seguente sistema:
\begin{cases}x-y = 8 \\ \\ x+y = 0 \end{cases}è determinato. Infatti la corrispondente condizione viene soddisfatta:
\dfrac{a_1}{a_2} \neq \dfrac{b_1}{b_2} \quad \Rightarrow \quad \dfrac{1}{1} \neq \dfrac{-1}{1} \quad \textbf{vero}Come già sottolineato in precedenza osserviamo che in questo caso non ha nessuna importanza valutare il rapporto tra i termini noti. Il sistema è comunque determinato.
E per i sistemi con più di due equazioni e due incognite?
Per quanto riguarda i sistemi con più di due equazioni e due incognite, ricavare delle condizioni che permettano di stabilire se un sistema è determinato oppure no senza risolverlo risulta più complicato.
Ad esempio, nel caso dei sistemi di tre equazioni in tre incognite occorrerebbe ragionare considerando i piani corrispondenti alle equazioni del sistema, e capire se questi si intersecano tra di loro oppure no. Ciò è del tutto simile ai ragionamenti fatti sulle rette per i sistemi di due equazioni in due incognite, ma più laborioso.
Tuttavia, per un qualunque sistema lineare, è possibile accorgersi se questo è determinato, indeterminato o impossibile anche mentre si tenta di risolverlo. Per ora ci limiteremo a fare un ragionamento valido per i metodi di sostituzione, di riduzione e del confronto.
In particolare, se risolvendo un sistema lineare ci ritroviamo con un’equazione che dà luogo ad una uguaglianza falsa, il sistema è impossibile.
Invece, se risolvendo un sistema lineare ci ritroviamo con un’equazione che dà luogo ad un’uguaglianza sempre vera (identità), il sistema è indeterminato.
Vediamo subito un paio di esempi, relativi a sistemi con due equazioni in due incognite. Tuttavia, i ragionamenti sono gli stessi anche per sistemi con più di due equazioni.
Esempio 4
Proviamo a risolvere il seguente sistema:
\begin{cases} 4x-8y=20 \\ \\ x- 2y = 8\end{cases}Dividiamo tutti i termini della prima equazione per {4}:
\begin{cases} x-2y=5 \\ \\ x- 2y = 8\end{cases}Applicando il metodo di riduzione, sottraendo la seconda equazione alla prima, eliminiamo entrambe le incognite e ci ritroviamo con l’uguaglianza:
\cancel{x}-\cancel{2y}-\cancel{x}+\cancel{2y}=5-8 \quad \Rightarrow \quad 0=-3 \quad \textbf{falso}L’uguaglianza ottenuta è falsa e di conseguenza il sistema è impossibile.
Esempio 5
Proviamo a risolvere il seguente sistema:
\begin{cases}16x+8y=32 \\ \\ 14x+7y=28 \end{cases}Dividiamo anzitutto tutti i termini della prima equazione per {8} e tutti i termini della seconda equazione per {7}:
\begin{cases} 2x+y=4 \\ \\ 2x+y=4\end{cases}Utilizziamo il metodo riduzione, sottraendo la seconda equazione alla prima:
2x+y-2x-y=4-4 \quad \Rightarrow \quad 0=0
Abbiamo ottenuto un’uguaglianza numerica vera, e quindi un’identità. L’uguaglianza è infatti verificata per ogni valore delle incognite. Di conseguenza il sistema è indeterminato.
Ciò era evidente, poiché una volta semplificate le equazioni ci siamo ritrovati con due equazioni a sistema uguali. Ciò significa, geometricamente, che abbiamo due rette che si intersecano in tutti i loro punti. E ciò corrisponde come sappiamo ad un sistema indeterminato.
Conclusioni
Per questa lezione sui sistemi lineari determinati, indeterminati e impossibili è tutto. Nella prossima lezione ci occuperemo dei sistemi lineari parametrici (sempre a livello di scuole superiori).
Un saluto a tutti voi e buono studio con SìMatematica! 🙂
| « Lezione precedente | Esercizi correlati | Lezione successiva » |
| Ulteriori esercizi |